Salut,
je relance le sujet pour partager mes trouvailles du jour concernant la compréhension du drive en courant et des effets de l’impédance négative... on est sur des basics mais progressivement ça rentre.
En fait je suis reparti du schéma de simulation posté il y a (déjà) une semaine et je le complexifie pour comprendre les effets de tel ou tel changement.
voici le schéma du jour
https://drive.google.com/file/d/0B5D8h5 ... sp=sharingavec un courbe qui montre la variation de SPL et de tension en sortie de l'ampli, en fonction d'un changement sur la résistance qui dose la contre réaction sur la mesure de courant (R6/Rfb).
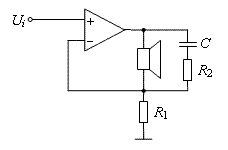
c'est un ampli de gain 20 ((R4-R5)/R5) mais en injectant la tension présente aux bornes de la résistance de mesure (R2=Re/10) on peux passer d'un mode "ampli tension" à "ampli courant" facilement:
Si on choisi Rfb proche de 0 on est en ampli de courant puisque l'ampli s’arrange pour avoir la même tension entre ces entrées + et - donc vin=I.R2 -> I = Vin/R2
On voit le pic à 28khz qui prouve l'instabilité.
En choisissant Rfb=40ohm dans cet exemple, on réduit le pic et on évite l'instabilité. En d'autre terme en réduisant la contre réaction positive on diminue l’impédance négative et on à un système stable.
Je pense que cette manip correspond au réglage "alpha0" sur un Zippy, qu'il faut calibrer à l'oreille pour être juste en dessous du "souffle" cf ce post
post178125630.html#p178125630mais si on augment Rfb, on réduit la possibilité de corriger les variation de Re et Le(x). Sur le site current-drive.info, Esa explique qu'il suffit de mettre un RC en parallèle du HP pour s'affranchir du problème de stabilité. Effectivement, en testant une combinaison de 200 à 400 ohms et une capa de 100nf sur le HP on aplatit le pic à 28khz. cela fonctionne aussi en connectant le RC entre la sortie de l'ampli et son entrée inverseuse.
Il est donc envisageable d'utiliser un ampli "debase", de relier l'entrée négative avec la résistance de mesure, d'ajouter un RC et on a une solution drive en courant qui compense parfaitement les variation de l'impédance électrique Re,Le et autres effets microphonique, tout en étant stable, comme ceci:
 on voit aussi avec cette simulation que la variation de BL(x) ne produit pas le même effet sur un drive courant ou tension...
on voit aussi avec cette simulation que la variation de BL(x) ne produit pas le même effet sur un drive courant ou tension...
Dans le cas du drive courant (Rfb=1 par exemple), la variation de BL génère une variation de SPL de quelques db, constants sur toute la bande.
dans un drive en tension (RFB infinie) cette variation se repercute aussi sur la réponse en fréquence. Donc à vue d’œil de noob, le drive en courant affranchit le déphasage engendré par les variations de BL(x), et Esa mentionne cela comme étant purement et simplement une réduction de jitter dans la bande audio principale du driver (cf document edn part2 du poste 2).
voici le zoom sur l’évolution du SPL en fonction d'une variation de BL dans les 2 cad:
https://drive.google.com/file/d/0B5D8h5 ... sp=sharingce n'est pas totalement représentatif bien sur puisque le BL varie instantanément en fonction du déplacement de la membrane.
Bon il reste tout de même un problème de taille : la surtension a la fréquence d'accord qui doit être compensée quelque part, soit dans une fonction de transfert en amont soit par un filtrage genre LT, peut etre dans la boucle de réaction négative... à suivre / merci pour votre lecture patiente !
















